CylindricalSag#
- class optika.sags.CylindricalSag(radius=<Quantity inf mm>, *, transformation=None, parameters_slope_error=None, parameters_roughness=None, parameters_microroughness=None)[source]#
Bases:
AbstractSagA cylindrical sag function, where the local \(y\) axis is the axis of symmetry for the cylinder.
The sag (\(z\) coordinate) of a spherical surface is calculated using the expression
\[z(x, y) = \frac{c x^2}{1 + \sqrt{1 - c^2 x^2}}\]where \(c\) is the
curvature, and \(x\) is the horizontal component of the evaluation point.Examples
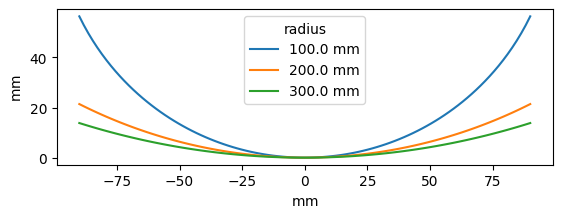
Plot a slice through the sag surface
import matplotlib.pyplot as plt import astropy.units as u import astropy.visualization import named_arrays as na import optika sag = optika.sags.SphericalSag( radius=na.linspace(100, 300, axis="radius", num=3) * u.mm, ) position = na.Cartesian3dVectorArray( x=na.linspace(-90, 90, axis="x", num=101) * u.mm, y=0 * u.mm, z=0 * u.mm ) z = sag(position) with astropy.visualization.quantity_support(): plt.figure() plt.gca().set_aspect("equal") na.plt.plot(position.x, z, axis="x", label=sag.radius) plt.legend(title="radius")
Attributes
The microroughness parameters for this sag profile.
The roughness parameters for this sag profile.
The slope error parameters for this sag profile.
The radius of this cylinder.
The array shape of this object.
The transformation between the surface coordinate system and the sag coordinate system.
Methods
__init__([radius, transformation, ...])intercept(rays)A set of new rays with the same direction as the input rays, but with the
optika.rays.RayVectorArray.positionupdated to their interception point with this sag function.normal(position)The vector perpendicular to the surface at the given position.
propagate_rays(rays)For the given input rays, calculate new rays based off of their interation with this object.
to_string([prefix])Public-facing version of the
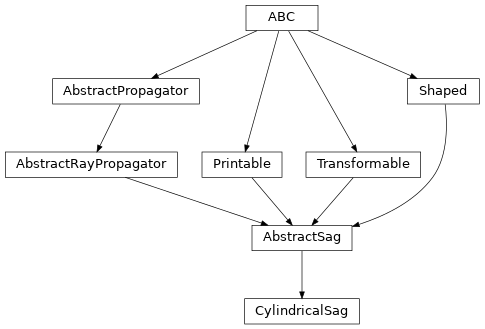
__repr__method that allows for defining a prefix string, which can be used to calculate how much whitespace to add to the beginning of each line of the result.Inheritance Diagram
- Parameters:
radius (Quantity | AbstractScalar)
transformation (None | AbstractTransformation)
parameters_slope_error (None | SlopeErrorParameters)
parameters_roughness (None | RoughnessParameters)
parameters_microroughness (None | RoughnessParameters)
- intercept(rays)[source]#
A set of new rays with the same direction as the input rays, but with the
optika.rays.RayVectorArray.positionupdated to their interception point with this sag function.- Parameters:
rays (AbstractRayVectorArray) – input rays that will intercept this sag function
- Return type:
- normal(position)[source]#
The vector perpendicular to the surface at the given position.
- Parameters:
position (AbstractCartesian3dVectorArray) – The location on the surface to evaluate the normal vector
- Return type:
- propagate_rays(rays)#
For the given input rays, calculate new rays based off of their interation with this object.
- Parameters:
rays (AbstractRayVectorArray) – A set of input rays that will interact with this object.
- Return type:
- to_string(prefix=None)#
Public-facing version of the
__repr__method that allows for defining a prefix string, which can be used to calculate how much whitespace to add to the beginning of each line of the result.
- parameters_microroughness: None | RoughnessParameters = None#
The microroughness parameters for this sag profile.
- parameters_roughness: None | RoughnessParameters = None#
The roughness parameters for this sag profile.
- parameters_slope_error: None | SlopeErrorParameters = None#
The slope error parameters for this sag profile.
- radius: Quantity | AbstractScalar = <Quantity inf mm>#
The radius of this cylinder.
- transformation: None | AbstractTransformation = None#
The transformation between the surface coordinate system and the sag coordinate system.